大疆智图使用教程
大疆智图使用教程by zwj 2021/6/11
大疆智图是一款提供自主航线规划、飞行航拍、二维正射影像与三维模型重建的 PC 应用软件。一站式解决方案帮助行业用户全面提升航测内外业效率,将真实场景转化为数字资产。
官网地址: https://www.dji.com/cn/dji-terra
简介“御” 2 行业进阶版拥有更高清、流畅的热成像传感器和更高像素的可见光传感器,支持 32 倍数码变焦,可搭载 RTK 模块实现厘米级定位,便携、可靠,高效洞悉作业现场细节。
640*512 30Hz 热成像相机
4800万像素可见光相机
32倍率数码变焦
厘米级RTK定位
10km高清图传
六向避障
实际到货套装清单:
RTK模块安装示意图:
飞行前准备(外业)首先启动遥控器、飞行器,使得二者连接成功(电源按钮的启动方式是短按再长按2秒)
1.航线规划打开无人机遥控器进入飞行界面Pilot
再飞行界面中选择航线飞行
选择所需要添加的航线飞行规划模式:
1.航点飞行:设置航点,无人机将会按照设置路线飞行
2.建图航拍:框选一个区域,无人机将会进行二维正摄摄影得到一个二维地图
...
HBS数据备份
HBS 3给你的NAS的数据做个备份随着数据越来越多,需要的空间也越来越大,同时为了高效地管理数据和兼顾数据的安全,我在去年年底在某鱼购入了一台有NAS品牌商生产的qnap 453b mini 这款NAS虽然是453d mini的上一代产品,但是它的性能和扩展性也足够了。但是NAS买回来没有第一时间用起来,而是在一角默默躺着吃灰。最近也是搬了新家才将其带到新家重新利用起来的。
现在NAS被我东拼西凑出3块硬盘分别是2块2T的希捷+1块1T的WD蓝盘,这2块2T的硬盘组成了一个4T的硬盘阵列,RAID1拥有2倍数的读取写入速度但是安全性也打了折扣–任何一块硬盘出故障了都会导致整个硬盘阵列数据全部丢失。这个4T的阵列中储存了很多我旅行、参观、生活、工作和家人们的照片,除此之外还有利用Qsync备份的工作文档,林林总总。反正现在就是担心这些珍贵数据的安全,提前做好重要数据资料的备份。
毕竟..数据无价…..
在查询了众多资料之后我找到了威联通套件中心的HBS3备份与同步中心 利用这个玩意就可以轻而易举地构建你的数据安全堡垒了!!
威联通的数据安全备份管家:HBS3
是数据备份和恢复的 ...

frp内网穿透
Frp内网穿透–在公网访问局域网资源
frp文档
GitHub
上传上传frp到你的服务器’root‘目录
修改配置修改frps.ini 配置文件,因为我们服务器上运行的是frps服务端,所以我们需要修改一下服务端的配置文件,怎么配置fprs其实康康官方文档就好了:链接
最简约的其实就只有一行(如下)
123# frps.ini [common] bind_port = 7000
当然这里有一些推荐的配置(比如说一个数据展示页面)
1234567891011[common]bind_port = 7000token = admin123456[common]dashboard_port = 7500# dashboard的用户名和密码均为可选,如未设置,默认为admin。dashboard_user = admindashboard_pwd = admin
指定了一个默认7000端口
防火墙中放行相应的7000和7500端口
启动先进入到刚刚上传的frp目录
1cd /root/frp
frps在服务器A上启动:就可以看到frps服务端开始进行了
1./frps - ...

AD再见
AdGuardHome神器
最近拿到了NanoPi R4S 开发板作为一个软路由,以前也是陆陆续续学习了搭建openwrt的一些方法,正好拿到了新的硬件,正好来研究一下。最近发现网络中的广告越来越多了,所以就想利用openwrt里部署的AdGuard Home作为一个dns网关,帮我们去除网络中烦人的“牛皮癣”。
NanoPi R4S 开发板的全名是高性能边缘计算路由器R4S,这款开发板具有2个千兆以太网网口,一个是SoC引出,另外一个是由PCle转接。
SoC用的是RK3399作为主控,主频1.8GHz,板载1G或者4G 内存,2个USB3.0接口可接USB WIFI、储存设备,保证了性能和扩展性。
官方开发文档在这:(链接)
装好openwrt系统就可以开始了(系统链接)
在系统–软件包–安装好AdGuardHome就可以进行下一步的配置了
AdGuardHome的官方主页
以下是AdGuardHome的描述
AdGuardHome您和您的设备的隐私保护中心免费和开源,功能强大的全网络广告和跟踪器阻止了DNS服务器。
AdGuard Home是用于阻止广告和跟踪的全网络软 ...

三维地图
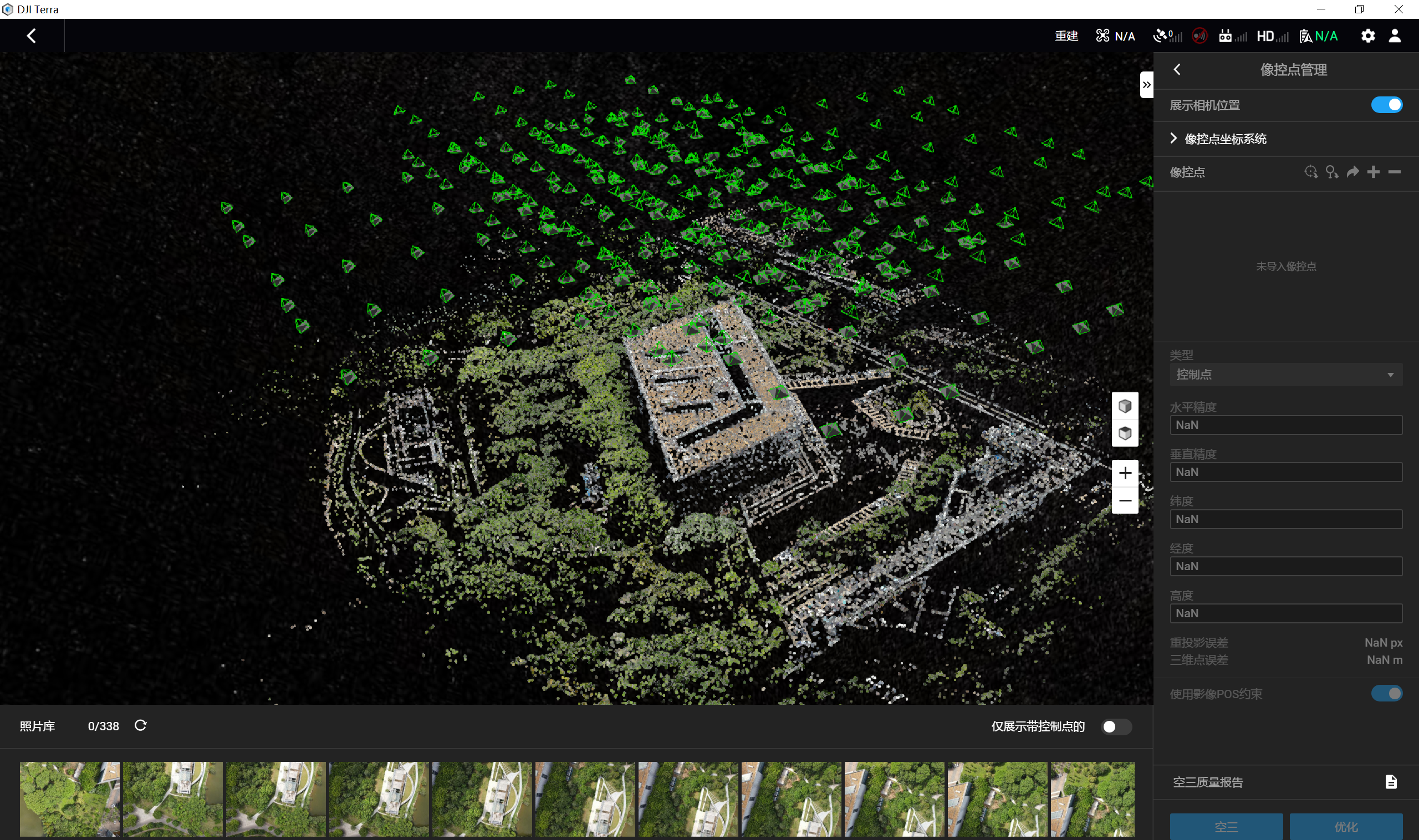
三维地图建模调研报告
三维电子地图,或3D电子地图,就是以三维电子地图数据库为基础,按照一定比例对现实世界或其中一部分的一个或多个方面的三维、抽象的描述。网络三维电子地图不仅通过直观的地理实景模拟表现方式,为用户提供地图查询、出行导航等地图检索功能,同时集成生活资讯、电子政务、电子商务、虚拟社区、出行导航等一系列服务。网络三维电子地图在给人们带来方便的同时,也给国家安全、社会稳定和人们隐私等带来威胁。
0x00三维地图的作用三维地图作为一种记录环境信息的载体,还能作为地图查询、车辆导航等地图检索功能,具有实时、直观、可视化的优点。目前拿我们的项目来说,园区智能物流车、管道无人机巡检系统、园区巡检无人车都能利用上三维地图的这些优点。在东阳光乳源电化厂单总的交谈中得出了利用各种各样的无人车、无人机、智能设备完成电化厂的日常巡检、安防、排障、运输等功能的结论,除此之外单总还描绘了一个完全远程操控、实时操控、无人监管的宏伟蓝图。当然后者应该是一个长期的目标,我们要解决的是怎么完成前者的任务:利用大疆RTK行业无人机构建的三维地图
0x01技术原理地图是根据一定的数学法则,将自然地理的自然 ...

2020年毕业一年总结
转眼就是2021年4月份了,时隔快一年了回到自己的网站了。同时也意味着我毕业也快一年了,工作也快一年了。
0x00 实习在毕业之前我去了中国光电集团实习了一段时间,承接的是海外(马来西亚)的光伏发电项目,在马来待了一段时间也算耳濡目染了一下当地人的生活习性,在那边我惊喜的发现可以当地人一个专车司机居然具有种6语言:英语、普通话、粤语、马来西亚语、泰语、潮汕话等等。这样一来就开森了,我一下就有3种语言交流了(普通话、粤语、和我一般般的英语),结果后来发现不是每个人懂那么多种语言的,还是要用英语交流。。。
0x01 毕业我是2020年6月份毕业的,感觉2020年过年后像是失忆了,时间很快就过了,因为疫情的缘故我们仓促毕业。在那段时间在家毕业设计,和兄弟朋友一起网上视频聊天。
终于等到了5月底回学校的通知,而这一次,不是开学,而是回去收拾东西走人。而且还分多批陆陆续续地回校,er好多同学连最后一面都见不到了。
5月底,稀稀疏疏地回到学校,在食堂吃一顿、在宿舍串串门分享一下对未来的彷徨、找老师聊聊天、拿几套衣服拍个单人毕业照。转眼宿舍已经空空的了,我送走宿舍的“大力哥”后就仅剩我一人了, ...

docker学习
Docker学习记录最近也是把基于aurco的视觉室内定位做好了,摄像头通过检测aruco码就可以获得相对距离和角度,再带入整个机器人的地图中就可以起到一个很好的辅助定位的功能。不过确定就是aruco标签的样式是无法更改的,就一张A4纸贴在墙面上非常影响美观,所以说下一步应该就是进行物体检测例如检测到一幅画、一面墙壁、一个楼梯等特征比较明显的物体来辅助定位。
要实现物体检测我觉得光靠opencv的级联分类器是远远不够的,所以项目肯定是要往速度学习上靠拢的。项目组正好有一台正在使用的GPU服务器,我粗略地看了下配置:cpu是两路志强E5-2640 v4 @ 2.40GHz,8路gtx1080ti,250G内存。
目前有个问题就是,服务器目前运行着项目组其他成员的一些训练程序而且我们用的编程环境可能不同就会造成cuda、tensorflow环境错误。因此我们要使用docker作为训练环境的整体。本文就是记录一些docker的使用方法,作为初学者,记录一下还是很有必要的。
安装简介:Docker是一个开源的应用容器引擎,让开发者可以打包他们的应用以及依赖包到一个可移植的镜像中,然后发布到 ...

基于ArUco的距离角度定位
基于ArUco的距离角度定位
利用aruco.estimatePoseSingleMarkers()函数返回找到的aurco标签的rvec旋转矩阵、tvec位移矩阵进行换算,找出aurco相对于相机cam的距离和角度,实现利用aurco进行定位
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141import numpy as npimport timeimport cv2import cv2.aruco as ar ...

学习matplotlib-python数据可视化
Matplotlib介绍matplotlib是Python编程语言及其数值数学扩展包 NumPy的可视化操作界面。它利用通用的图形用户界面工具包,如Tkinter, wxPython, Qt或GTK+,向应用程序嵌入式绘图提供了应用程序接口(API)。此外,matplotlib还有一个基于图像处理库(如开放图形库OpenGL)的pylab接口,其设计与MATLAB非常类似–尽管并不怎么好用[来源请求]。SciPy就是用matplotlib进行图形绘制。
matplotlib最初由John D. Hunter撰写,它拥有一个活跃的开发社区,并且根据BSD样式许可证分发。 在John D. Hunter2012年去世前不久,Michael Droettboom被提名为matplotlib的主要开发者。
截至到2015年10月30日,matplotlib 1.5.x支持Python 2.7到3.5版本。Matplotlib 1.2是第一个支持Python 3.x的版本。Matplotlib 1.4是支持Python 2.6的最后一个版本。
Matplotlib 可能是 Python 2D- ...